Cours 25 avr 2024 14:00 à 15:00 Thomas Römer « Noé but du vin et s’enivra… » – L’invention du vin et la différenciation des peuple…
Grand événement 25 avr 2024 19:30 à 21:00 Patrick Boucheron, Julien Sorez et Emmanuel Laurentin Écrire l’histoire du sport et des Jeux olympiques
Conférencier invité 26 avr 2024 11:00 à 12:00 Christophe Nihan Nourrir les morts : genèse et transformations d'une pratique funéraire dans l'Israël ancien
Séminaire 26 avr 2024 15:30 à 16:30 Anne-Marie Aubert Séries à la Bernstein de paramètres de Langlands enrichis et algèbres de Hecke
Cours 29 avr 2024 14:30 à 15:30 Peter Sloterdijk La grande école du monde : L’Europe comme cadre d’apprentissage
Séminaire 29 avr 2024 15:45 à 16:45 Peter Sloterdijk La grande école du monde : L’Europe comme cadre d’apprentissage
Cours 30 avr 2024 10:00 à 11:00 Salikoko S. Mufwene L’indigénisation du français en Afrique et en Amérique du Nord
Séminaire 30 avr 2024 11:15 à 12:15 Musanji Ngalasso-Mwatha L’africanisation du français ou le français comme une langue africaine
Séminaire 30 avr 2024 16:30 à 18:00 Michel Kokoreff Pratiques policières, crimes d’État Non enregistré
Séminaire 30 avr 2024 17:00 à 19:00 Hugo Óscar Bizzari et Joël Blanchard Après le songe. Le réveil du rêve Trastamare chez Pero López de Ayala
Grand événement 30 avr 2024 18:00 à 19:00 Antoine Compagnon Aperçu des chaires scientifiques au Collège de France durant le XIXe siècle
Cours 02 mai 2024 14:00 à 15:00 Thomas Römer « La terre entière n’était qu’une seule langue… » – La tour de Babel et la dispersion…
Grand événement 02 mai 2024 19:30 à 21:00 Sonia Garel, Claire Thomas-Junius et Emmanuel Laurentin Biologie de la performance sportive
Séminaire 03 mai 2024 10:30 à 12:00 Frantz Grenet et Ching Chao-jung A new reading of Chinese accounts on the Yuezhi and early Kushans, in …
Séminaire 03 mai 2024 15:30 à 16:30 Maarten Solleveld Standard Modules and the P-Adic Kazhdan-Lusztig Conjecture
Cours 06 mai 2024 14:30 à 15:30 Peter Sloterdijk Out of Revolution : Comment un historien allemand exp…
Séminaire 06 mai 2024 15:45 à 16:45 Peter Sloterdijk Out of Revolution : Comment un historien allemand exp…
Conférencier invité 06 mai 2024 17:00 à 18:00 Tony Hunter Post-translational Modifications of Proteins – Why Nature Chose P…
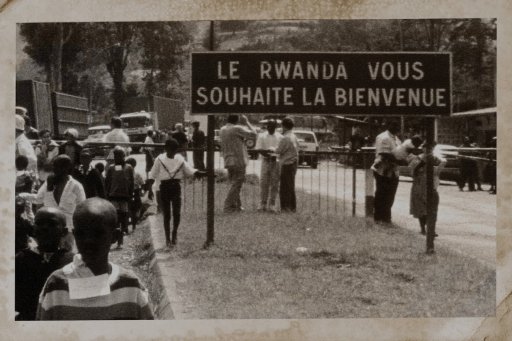
Tables rondes : Un passé récent. Rwanda (1994-2024) Patrick Boucheron, chaire Histoire des pouvoirs en Europe occidentale, XIIIe-XVIe siècle Publié le 11 avril 2024
Enquête sur l'offre et les services numériques du Collège de France Collège de France Publié le 23 février 2024
Parution : Les Valeurs de l’Europe, un enjeu démocratique Éditions du Collège de France Publié le 24 avril 2024
Chaire d'excellence en Biologie-Santé Thomas Lecuit, chaire Dynamiques du vivant Publié le 23 avril 2024
Populations humaines et changements climatiques durant la dernière déglaciation Edouard Bard, chaire Évolution du climat et de l'océan Publié le 19 avril 2024
Trésors audiovisuels du Collège de France : des leçons inaugurales à redécouvrir (3) Alain Connes, chaire Analyse et géométrie Publié le 19 avril 2024
Karl-Oskar Lindgren Breaking the Cycle: Education's Role in Reducing Political Inequality 23 avril 2024
Patrick Boucheron et François Foronda Comment se réveiller politiquement ? Autour d’Alain Chartier, tentative de définition d’un genre 23 avril 2024